车辆环境感知:技术发展与应用前景

一、车辆环境感知概述

车辆环境感知是自动驾驶技术的重要组成部分,通过一系列传感器和算法,车辆可以获取周围环境的信息,进而进行决策和行为规划。环境感知主要包括障碍物识别、交通标志识别、行人识别、车道线检测等功能,为车辆提供实时道路状况、交通信号、其他车辆和障碍物的位置和速度等信息。
二、传感器类型及应用

1. 摄像头:主要用于图像识别,包括交通标志、车道线、行人等目标的识别。
2. 雷达:可以发射电磁波并接收反射回来的信号,通过测量反射信号的强度、时间和角度等信息,判断障碍物的位置、速度和方向。
3. 激光雷达(LiDAR):通过发射激光束并接收反射回来的信号,可以获取周围环境的3D信息,对障碍物进行精确的定位和分类。
4. 超声波传感器:用于近距离的环境感知,如车辆周围的障碍物检测。
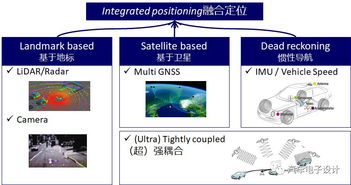
5. GPS和惯性测量单元(IMU):用于获取车辆的定位和姿态信息。
三、感知系统硬件架构

车辆环境感知系统主要包括传感器、硬件平台和数据处理与分析模块。传感器负责获取环境信息,硬件平台包括高性能处理器、存储器和接口等,数据处理与分析模块则对获取的数据进行预处理、特征提取和分类识别等操作。
四、数据处理与分析方法

数据处理与分析是车辆环境感知的关键环节,包括数据预处理、特征提取和分类识别等步骤。数据预处理包括去噪、滤波和数据融合等操作,特征提取则是从预处理后的数据中提取出与目标相关的特征,分类识别则是根据提取的特征对目标进行分类和识别。常用的算法包括卷积神经网络(C)、支持向量机(SVM)、决策树(DT)等。
五、感知系统面临的挑战及解决策略

1. 传感器性能问题:受限于多种因素,如天气、道路状况等,传感器的性能可能会受到影响。解决策略包括采用多种类型的传感器,以弥补单一传感器的不足;同时,也需要不断优化传感器的硬件和软件性能。
2. 数据处理与分析的复杂性:大量的环境数据需要高效的处理和分析,要求系统具有高性能的计算能力和高效的算法。解决策略包括采用更高效的计算平台和优化的算法。
3. 感知系统的安全性:对于自动驾驶系统来说,安全性是至关重要的。解决策略包括采用多种传感器融合技术,以提高感知的准确性和稳定性;同时,也需要设计完善的安全验证和测试流程。
六、车辆环境感知技术的发展趋势

1. 传感器技术的进步:随着科技的不断发展,新型的传感器技术将不断涌现,如固态激光雷达、红外传感器等,这些技术将进一步提高环境感知的精度和可靠性。
2. 数据处理与分析方法的优化:随着机器学习和深度学习技术的不断发展,数据处理与分析的方法将不断优化,提高感知系统的效率和准确性。
3. 多传感器融合技术的普及:多传感器融合技术可以提高感知系统的稳定性和准确性,是未来车辆环境感知技术的重要发展方向。
4. 自动驾驶技术的整体发展:自动驾驶技术的发展将推动车辆环境感知技术的不断进步,同时,车辆环境感知技术的发展也将促进自动驾驶技术的整体发展。
七、未来展望与结论
车辆环境感知技术是实现自动驾驶的关键环节之一,随着科技的不断进步和应用的不断深化,该领域将迎来更多的发展机遇。未来,我们将看到更加高效、稳定和可靠的车辆环境感知系统应用于自动驾驶车辆中,为人们的出行提供更加安全、舒适和便捷的服务。同时,该领域的发展也将带动相关产业的发展,创造更多的就业机会和社会价值。