车辆环境感知
1. 车辆环境感知概述
车辆环境感知是自动驾驶技术中的重要组成部分,通过感知车辆周围环境信息,为自动驾驶系统提供准确、实时的数据,从而确保车辆在各种道路条件下的安全、稳定行驶。车辆环境感知技术主要包括视觉感知、雷达感知、GPS定位与导航等技术。
2. 感知系统的构成与工作原理
车辆感知系统主要由传感器、控制器、执行器等组成。传感器负责采集车辆周围环境信息,包括摄像头、激光雷达、毫米波雷达等;控制器接收传感器数据并进行分析处理,输出控制指令;执行器根据控制指令执行相应动作,如转向、加速、制动等。
感知系统的工作原理基于机器视觉和机器学习等技术,通过摄像头等视觉传感器获取周围环境图像信息,经过图像处理和特征提取等步骤,实现对车辆周围环境的识别和判断,进而为自动驾驶系统提供决策依据。
3. 车辆视觉感知技术
车辆视觉感知技术是利用摄像头等视觉传感器获取车辆周围环境图像信息,经过图像处理和特征提取等步骤,实现对车辆周围环境的识别和判断。视觉感知技术具有数据丰富、信息真实等特点,可实现对车辆周围的行人、车辆、道路标志等目标的识别和判断。
4. 车辆雷达感知技术
车辆雷达感知技术是利用毫米波雷达等传感器获取车辆周围环境信息,经过数据处理和分析,实现对车辆周围环境的感知和判断。雷达感知技术具有精度高、稳定性好等特点,可实现对车辆周围的车辆、行人等目标的距离、速度等信息采集和判断。
5. 车辆GPS定位与导航系统
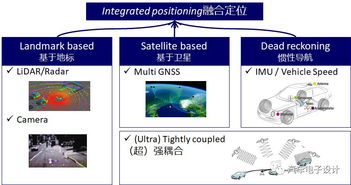
车辆GPS定位与导航系统是利用GPS等卫星定位技术获取车辆位置信息,结合道路地图数据实现车辆导航功能。GPS定位与导航系统具有精度高、实时性好等特点,可为自动驾驶系统提供准确的位置信息和道路信息。
6. 车辆环境感知的应用场景
车辆环境感知技术可广泛应用于自动驾驶、智能交通、智慧城市等领域。例如,在自动驾驶领域,车辆环境感知技术可实现车辆的自主导航、障碍物识别与避障等功能;在智能交通领域,车辆环境感知技术可实现交通拥堵预测与疏导、智能交通信号控制等功能;在智慧城市领域,车辆环境感知技术可实现城市交通监管与调度、公共安全监控等功能。
7. 未来发展趋势与挑战
随着技术的不断发展,车辆环境感知技术将迎来更多的应用场景和更广阔的发展空间。未来发展趋势包括提高感知精度和稳定性、拓展应用领域、降低成本等方面。同时,也面临着一些挑战,如传感器数据融合技术、数据安全与隐私保护等问题。
车辆环境感知技术是自动驾驶技术的核心组成部分,具有广泛的应用前景和市场前景。未来需要不断加强技术研发和应用探索,推动车辆环境感知技术的进一步发展与应用。