车辆环境感知技术:原理、应用与挑战
==================
引言--
随着科技的飞速发展,自动驾驶技术已成为当今社会的热门话题。车辆环境感知作为自动驾驶技术的核心组成部分,对于实现安全、高效的自动驾驶具有至关重要的作用。本文将深入探讨车辆环境感知技术的各个方面,包括技术概述、感知原理及应用、硬件和软件架构、性能评估与优化,以及在自动驾驶中的应用和未来发展趋势与挑战。
车辆环境感知技术概述------------
车辆环境感知技术是一种利用各种传感器、算法和数据处理技术,实现对车辆周围环境进行精确感知和理解的技术。其主要目的是提供关于环境全面、准确的信息,以支持车辆的自主决策和安全控制。
感知技术原理及应用------------
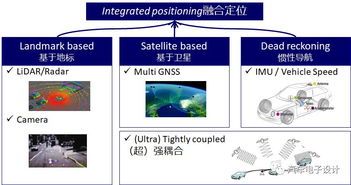
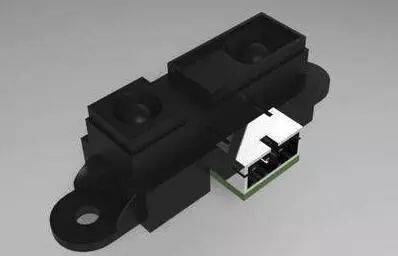
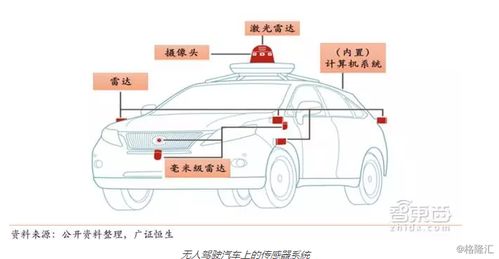
车辆环境感知技术主要依赖于各种传感器,如雷达、激光雷达(LiDAR)、摄像头、超声波传感器等,以及先进的计算机视觉和深度学习算法。这些传感器和算法可以提供关于环境的各种信息,如目标物体的位置、速度、形状、颜色等,以及道路标志、车道线、交通信号灯的状态等。
感知系统硬件架构及组成------------
感知系统的硬件架构通常包括传感器单元、数据处理单元和通信单元。传感器单元负责收集环境数据,如雷达收集距离和速度信息,摄像头收集图像信息等。数据处理单元则对收集到的数据进行处理和分析,提取出有用的信息。通信单元则负责将处理后的数据发送给车辆的决策控制系统。
感知系统软件架构及组成------------
感知系统的软件架构通常包括数据预处理、特征提取和目标识别三个部分。数据预处理负责对原始数据进行滤波、去噪等操作,提取出有效的环境信息。特征提取则通过对环境信息的分析,提取出目标物体的特征。目标识别则根据这些特征,对目标物体进行分类和识别。
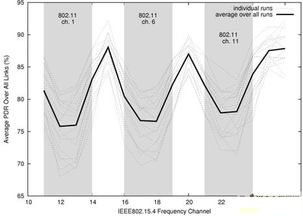
感知系统性能评估及优化------------
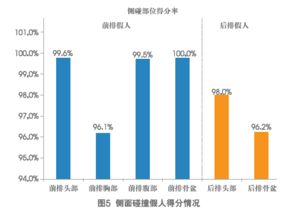
为了提高感知系统的性能,需要进行定期的性能评估和优化。评估指标包括但不限于检测精度、识别速度、误报率、漏报率等。优化方法则包括改进传感器性能、优化数据处理算法、提高系统运行效率等。
感知技术在自动驾驶中的应用------------
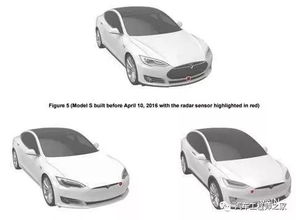
车辆环境感知技术在自动驾驶中有着广泛的应用。例如,利用雷达和LiDAR传感器进行障碍物检测和避障,利用摄像头进行车道线和交通信号灯识别,利用超声波传感器进行泊车辅助等。这些应用在提高自动驾驶安全性和效率方面具有重要作用。
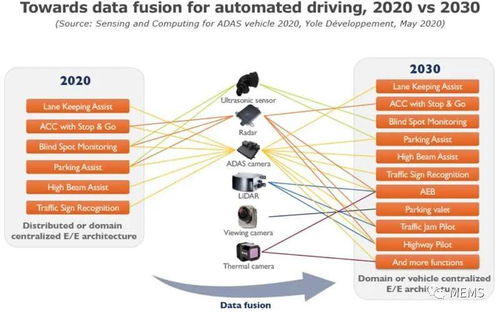
未来发展趋势及挑战-----------
随着科技的不断进步,车辆环境感知技术也在不断发展。未来的发展趋势包括更高精度的传感器、更智能的算法、更高效的数据处理技术等。同时,面临的挑战也越来越多,如复杂环境下的感知精度问题、传感器之间的数据融合问题、高成本问题等。为了解决这些问题,需要不断进行研究和创新。