传感器数据融合:定义、重要性、方法、步骤和应用前景
一、传感器数据融合的定义

传感器数据融合是一种处理多个传感器或数据源的信息的技术,通过优化组合这些数据,以获得更准确、更完整、更有价值的信息。简单来说,传感器数据融合就是将不同来源的数据进行综合分析,以得到最佳的决策或评估结果。
二、传感器数据融合的重要性

传感器数据融合在许多领域都有重要的应用,如无人驾驶汽车、机器人、航空航天、医疗诊断等。其主要重要性体现在以下几点:
1. 提高数据的准确性和完整性。通过融合多个传感器的数据,可以降低单个传感器的误差,提高整体数据的准确性和完整性。
2. 增强数据的可信度。多个传感器之间的数据可以相互验证,减少数据的不确定性和误报,提高数据的可信度。
3. 提高系统的智能水平。通过数据融合,可以使系统更好地感知和理解周围环境,提高系统的智能水平,从而更好地适应环境变化。
三、传感器数据融合的方法

目前常用的传感器数据融合方法有以下几种:
1. 加权平均法:对多个传感器的数据进行加权平均,以得到融合后的数据。这种方法简单易行,但权重设置需要经验。
2.卡尔曼滤波法:一种基于线性动态系统的高效递归数据处理算法,可以用来估计和预测状态变量。这种方法在处理动态系统时具有较高的精度和鲁棒性。
3.神经网络法:通过训练神经网络来学习不同传感器之间的映射关系,从而进行数据融合。这种方法需要大量的训练数据和计算资源。
4. 贝叶斯推理法:基于贝叶斯定理,通过已知的先验概率和条件概率来推断未知的后验概率。这种方法适用于多传感器之间的协同检测和识别。
5. 支持向量机法:一种基于统计学习理论的机器学习算法,可以用来处理多类分类问题。这种方法在处理高维数据时具有较好的性能。
四、传感器数据融合的步骤

传感器数据融合通常包括以下步骤:
1. 数据预处理:对原始数据进行清洗、滤波、标准化等预处理操作,以提高数据的准确性和完整性。
2. 数据配准:对不同传感器之间的数据进行对齐和匹配,以消除不同传感器之间的坐标系和测量单位等差异。
3. 数据融合:采用适当的方法对配准后的数据进行融合,以得到更准确、更完整、更有价值的信息。
4. 评估和优化:对融合后的数据进行评估和优化,以调整融合算法的参数和优化策略,提高数据融合的效果和质量。
五、传感器数据融合的应用场景

传感器数据融合在许多领域都有广泛的应用,如无人驾驶汽车、机器人、航空航天、医疗诊断等。以下是几个具体应用场景:
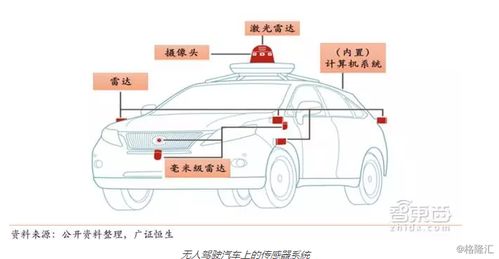
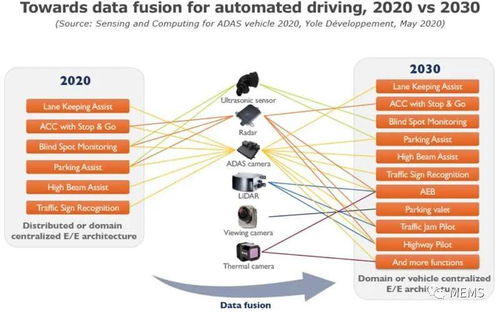
1. 无人驾驶汽车:通过融合雷达、激光雷达(LiDAR)、摄像头等多种传感器的数据,实现车辆的精确感知和导航。
2. 机器人:通过融合机器视觉、深度学习等技术,实现机器人的智能感知和控制。
3. 航空航天:通过融合多种传感器的数据,实现航空器和航天器的精确导航和控制。
4. 医疗诊断:通过融合医学影像、生理信号等多种传感器的数据,实现疾病的精确诊断和治疗。
5. 环境监测:通过融合多种环境传感器的数据,实现环境状态的实时监测和预警。