自动驾驶路线规划:基本概念、考虑因素与技术应用
一、自动驾驶路线规划概述

自动驾驶路线规划是自动驾驶技术的核心组成部分,它涉及到车辆导航、传感器数据融合、地图信息利用等多个方面。其主要目的是在考虑多种因素和条件的前提下,生成一条安全、高效、符合驾驶者期望的行驶路线。
二、路线规划的基本要素

1. 起点和终点:这是路线规划的起点和终点,可以是具体的地理位置,也可以是预设的路径。
2. 道路网络:这是车辆行驶的载体,包括各种道路、交叉口、交通标志等。
3. 障碍物:包括其他车辆、行人、道路施工等可能影响行驶的物体。
4. 交通规则:包括红绿灯、车道规定、速度限制等。
5. 驾驶者的偏好:如速度、舒适度等。
三、考虑因素与条件对路线规划的影响

1. 道路条件:如路面的状况、道路的宽度、交通标志等。
2. 交通状况:如车流量、平均速度、拥堵情况等。
3. 天气条件:如雨雪天气、雾霾天气等。
4. 车辆性能:如加速性能、刹车性能、续航能力等。
5. 安全因素:如事故发生率、路段的危险程度等。
四、自动化驾驶中路线规划算法的应用

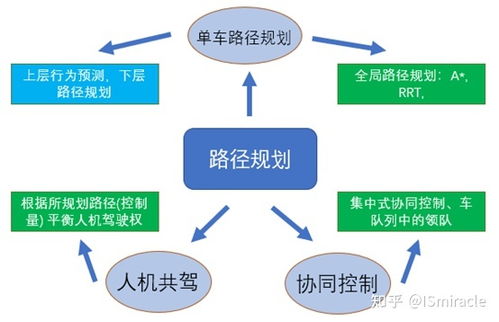
路线规划算法是自动化驾驶的核心技术之一,其应用包括全局路径规划和局部路径规划两个层次。全局路径规划主要考虑全局范围内的道路网络和交通状况,生成一条大致的行驶路径;局部路径规划则是在全局路径的基础上,根据车辆的实时位置和周围环境信息,生成一条详细的行驶轨迹。
五、利用地图信息与传感器数据进行路线规划

地图信息是路线规划的重要依据,包括道路网络信息、交通标志信息、交通信号灯信息等。同时,传感器数据也是路线规划的重要输入,如雷达数据可以提供前方障碍物的信息,摄像头数据可以提供道路状况和交通状况的信息。
六、考虑交通状况对路线规划的影响

交通状况是路线规划的重要考虑因素,包括车流量、平均速度、拥堵情况等。这些因素都会影响最终的行驶路径和行驶时间,因此在路线规划时需要充分考虑这些因素。
七、考虑车辆性能对路线规划的影响

车辆性能是路线规划的重要考虑因素,不同的车辆有不同的性能特点,如加速性能、刹车性能、续航能力等。在路线规划时需要考虑车辆的性能限制,以保证行驶的安全性和效率。
八、考虑安全因素对路线规划的影响

安全是路线规划的重要考虑因素,包括事故发生率、路段的危险程度等。这些因素都会影响最终的行驶路径和行驶速度,因此在路线规划时需要充分考虑这些因素。
九、基于人工智能的自动驾驶路线规划技术

人工智能是自动驾驶技术的重要发展方向,基于人工智能的自动驾驶路线规划技术主要包括机器学习、深度学习等方法。这些方法可以通过学习大量的数据来提高路线规划的准确性和效率。
十、基于强化学习的自动驾驶路线规划技术

强化学习是一种通过试错学习的方式来提高策略的方法,在自动驾驶路线规划中,可以通过强化学习来优化车辆的行驶策略。基于强化学习的自动驾驶路线规划技术主要包括Q-learig、SARSA等方法。这些方法可以使车辆在行驶过程中根据实时环境信息来动态调整行驶策略。
十一、基于深度学习的自动驾驶路线规划技术

深度学习是一种通过神经网络学习的方式来提高识别和预测能力的方法,在自动驾驶路线规划中,可以通过深度学习来提高对环境信息的识别和预测准确性。基于深度学习的自动驾驶路线规划技术主要包括卷积神经网络(C)、循环神经网络(R)等方法。这些方法可以利用大量的传感器数据来训练神经网络,从而更好地理解周围环境并生成更安全合理的行驶路径。