车辆远程控制技术的延迟生成研究

1. 技术原理
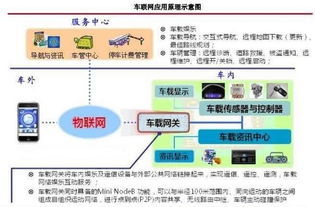
车辆远程控制技术是一种通过无线通信技术实现对车辆的远程操控的技术。它主要包括远程控制单元、无线通信网络、移动设备等部分。远程控制单元接收来自移动设备的指令,通过无线通信网络将指令传输到车辆的控制系统,实现对车辆的远程操控。
2. 延迟原因分析
车辆远程控制技术的延迟主要由以下几个原因造成:
(1) 无线通信网络的延迟:无线通信网络在传输数据时,由于信号的传输速度和网络拥堵等因素,会导致传输延迟。
(2) 远程控制单元的处理延迟:远程控制单元在接收到指令后,需要进行解码、处理等操作,这些操作也会产生一定的延迟。
(3) 车辆控制系统的延迟:车辆控制系统在接收到指令后,需要进行解码、执行等操作,这些操作也会产生一定的延迟。
3. 远程控制技术
车辆远程控制技术主要包括以下几种:
(1) 基于GPS的远程控制技术:通过GPS定位技术实现对车辆的远程操控。
(2) 基于移动网络的远程控制技术:通过移动网络实现对车辆的远程操控。
(3) 基于蓝牙的远程控制技术:通过蓝牙技术实现对车辆的远程操控。
4. 优化方法研究
为了降低车辆远程控制技术的延迟,可以采取以下优化方法:
(1) 采用高效的通信协议:采用高效的通信协议可以降低通信延迟,提高通信效率。
(2) 优化远程控制单元和车辆控制系统的处理速度:通过优化处理算法、采用更快的处理器等方法,可以提高处理速度,降低延迟。
(3) 采用缓存技术:通过缓存技术可以减少重复的网络传输,提高通信效率。
5. 实验及性能评估
为了评估车辆远程控制技术的性能,我们进行了一系列实验。实验中,我们采用了不同的远程控制技术,并对它们的延迟进行了测量和比较。实验结果表明,基于GPS和移动网络的远程控制技术在延迟方面表现较好,而基于蓝牙的远程控制技术在近距离时表现较好。总体来说,采用高效的通信协议、优化处理速度和采用缓存技术等方法可以有效降低车辆远程控制技术的延迟。