以防碰撞装置工作原理

1. 引言
随着现代交通工具数量的急剧增加,交通安全问题成为了一个全球性的挑战。防碰撞装置作为提高交通安全性的重要工具,越来越受到人们的关注。本文将详细介绍防碰撞装置的工作原理,包括其重要性、主要组成部分、传感器、控制系统、执行机构、优点与局限性等方面。
2. 防碰撞装置的重要性
防碰撞装置的主要作用是预防和减少交通事故的发生,提高道路安全。它能够通过感应车辆周围的状况,判断是否存在潜在的碰撞危险,并在必要时采取主动措施,如自动刹车或避让,从而避免或减少碰撞的发生。防碰撞装置对于保护驾驶员和乘客的生命安全具有至关重要的作用。
3. 防碰撞装置工作原理概述
防碰撞装置的工作原理基于传感器、控制系统和执行机构的协同作用。传感器负责探测车辆周围的交通状况,包括其他车辆、行人、道路标志等。控制系统则对传感器的数据进行处理和分析,判断是否存在碰撞危险,并做出相应的决策。执行机构根据控制系统的决策,采取措施来避免碰撞,如自动刹车、转向等。
4. 防碰撞装置的主要组成部分
防碰撞装置主要由传感器、控制系统和执行机构三部分组成。
4.1 传感器
传感器是防碰撞装置的“感知器官”,它能够感知车辆周围的交通状况,包括其他车辆、行人、道路标志等。传感器能够通过发射和接收无线电波、超声波等方式,探测目标物体的位置、速度等信息。这些信息被送入控制系统进行分析和处理。
4.2 控制系统
控制系统是防碰撞装置的“大脑”,它对传感器的数据进行处理和分析,判断是否存在碰撞危险,并做出相应的决策。控制系统通常包括计算机、芯片、算法等硬件和软件部分,能够根据传感器提供的信息和其他车辆、行人的位置、速度等信息,进行计算和分析,判断是否存在碰撞危险。
4.3 执行机构
执行机构是防碰撞装置的“手臂”,它根据控制系统的决策,采取措施来避免碰撞。执行机构通常包括刹车系统、转向系统等部分,能够在需要时自动刹车或转向,从而避免或减少碰撞的发生。
5. 防碰撞装置的传感器及其工作原理
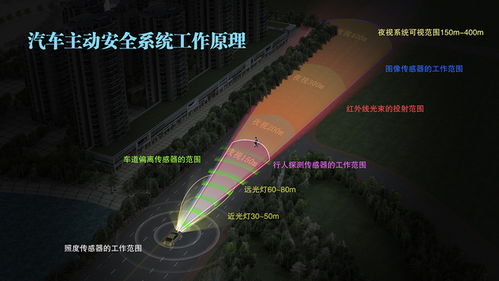
防碰撞装置的传感器主要包括雷达、激光雷达(LiDAR)、摄像头等。这些传感器能够通过发射和接收无线电波、激光束、可见光等方式,探测目标物体的位置、速度等信息。它们的工作原理如下:
5.1 雷达
雷达是一种利用无线电波探测目标物体的传感器。它能够发射无线电波,并接收从目标物体反射回来的无线电波,根据反射回来的时间和无线电波的速度,计算出目标物体的距离和速度等信息。雷达通常分为脉冲雷达和连续波雷达两种类型,前者能够提供更精确的距离测量,后者则具有更高的速度测量精度。
5.2 激光雷达(LiDAR)
激光雷达是一种利用激光束探测目标物体的传感器。它通过发射激光束并接收从目标物体反射回来的激光束,计算出目标物体的距离和速度等信息。激光雷达具有较高的测量精度和分辨率,能够在较远的距离上探测到目标物体。它通常用于自动驾驶车辆的高级感知系统。
5.3 摄像头
摄像头是一种利用可见光探测目标物体的传感器。它通过拍摄照片或视频,获取目标物体的位置、速度等信息。摄像头通常与图像处理技术结合使用,如特征提取、目标检测等算法,以提高对目标物体的识别和跟踪精度。摄像头通常用于车辆的辅助驾驶系统,如车道偏离预警、行人识别等。