自动驾驶计算单元
在过去的十年里,自动驾驶技术得到了前所未有的发展。作为自动驾驶技术的核心,计算单元起着至关重要的作用。本文将详细介绍自动驾驶计算单元的各个方面,包括计算单元概述、硬件、软件、算法、与传感器的融合、性能评估以及未来发展趋势和挑战。
1. 计算单元概述
自动驾驶计算单元是一种高性能的计算平台,用于处理和解析自动驾驶系统所需的大量数据。它通过高效率的计算和数据处理,实现了车辆的自主导航、障碍物识别、路径规划等功能。计算单元是自动驾驶系统的“大脑”,负责接收并处理来自各种传感器的数据,以及车辆自身的状态信息。
2. 计算单元硬件
自动驾驶计算单元的硬件主要包括高性能处理器、图形处理器、内存、存储和其他必要的接口。为了满足自动驾驶的需求,计算单元硬件需要具备高计算能力、低功耗、高可靠性和安全性等特点。硬件还需要具备可扩展性,以适应不断升级的软件需求。
3. 计算单元软件
自动驾驶计算单元的软件是实现各种功能的核心。它包括操作系统、驱动程序、应用程序等几个层次。操作系统为上层应用程序提供了一个统一的接口,驱动程序负责硬件设备的控制和管理,应用程序则实现了各种自动驾驶功能。
4. 计算单元算法
自动驾驶计算单元的算法主要包括机器学习、深度学习、计算机视觉等。这些算法被用于实现各种自动驾驶功能,如目标检测、跟踪、识别等。通过这些算法的处理,计算单元可以有效地解析传感器数据,识别障碍物、道路标志等信息,从而实现车辆的安全导航。
5. 计算单元与传感器融合
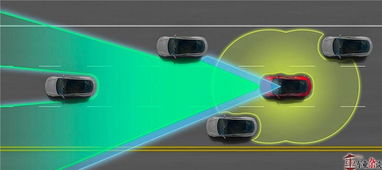
自动驾驶计算单元需要与多种传感器进行融合,包括雷达、激光雷达(LiDAR)、摄像头等。这些传感器可以提供关于周围环境的不同信息,如物体的位置、速度和形状等。通过计算单元的处理和分析,这些信息被融合在一起,以实现对周围环境的全面感知和理解。这种传感器融合技术是实现自动驾驶的关键之一。
6. 计算单元性能评估
为了评估自动驾驶计算单元的性能,我们通常采用以下指标:处理速度、功耗、可靠性、安全性等。处理速度决定了计算单元处理数据的速度,功耗反映了计算单元的能效表现,可靠性则代表了计算单元在各种工况下的稳定性和耐用性,安全性则是自动驾驶技术的关键要求之一。这些指标对于评估计算单元的性能具有重要意义。
7. 未来发展趋势与挑战
随着技术的不断进步,自动驾驶计算单元将继续向高性能、低功耗、高安全性和智能化方向发展。未来,计算单元将需要处理更大规模的数据和更复杂的场景,同时还需要具备自适应学习和优化能力。自动驾驶技术的发展还面临许多挑战,如数据安全和隐私保护、法规和政策限制等。为了实现自动驾驶技术的广泛应用,我们需要在克服这些挑战的同时,不断推动技术的发展和创新。
8. 结论与展望
自动驾驶计算单元是实现自动驾驶技术的核心之一。它通过高性能的计算和数据处理能力,实现了车辆的自主导航、障碍物识别等功能。未来,随着技术的不断进步和应用的不断拓展,自动驾驶计算单元将发挥更加重要的作用。我们期待着自动驾驶技术在解决交通拥堵、提高道路安全等方面发挥更大的潜力,为人们的生活带来更多的便利和安全。